23/10/17 : Bras de commande et compagnie...
Pendant que je réfléchis sur l'aménagement de la coque étanche, j'ai voulu commencer ce weekend à travailler sur la poupe. Hors j'ai du faire face à un petit problème logistique. En effet, avant de poser les tringleries, il me fallait des bras de commande, je suis donc allé plein d'allant dans le magasin de modélisme du coin dans l'intention d'aller en acquérir un certain nombre pour équiper le sous-marin. Sauf que...
Sauf que à 4.5€ pièce, faut pas déconner !
Je me suis fait la réflexion qu'à la base, ce machin, bah... c'est pas une pièce bien compliquée à faire. Du coup, puisque que j'ai une CNC, autan les faire moi-même ! Ce qui au passage me permet de faire quelques petites modifications. D'une part la vis de serrage sera en M4, ce qui permet une meilleur fixation sur la tringlerie et d'autre part je peux leur donner la forme que je veux ! 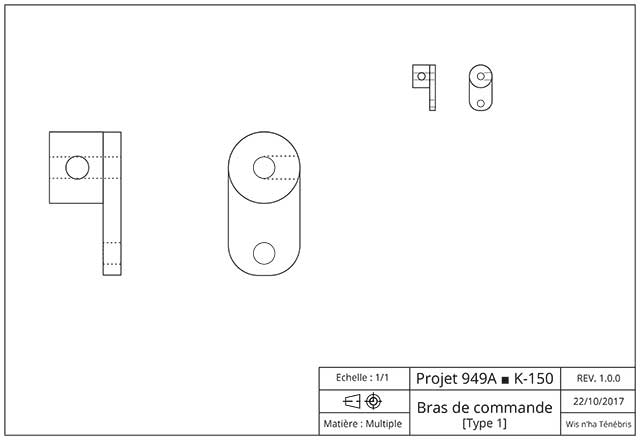
Ces bras de commande seront usinés dans du PVC de 10mm !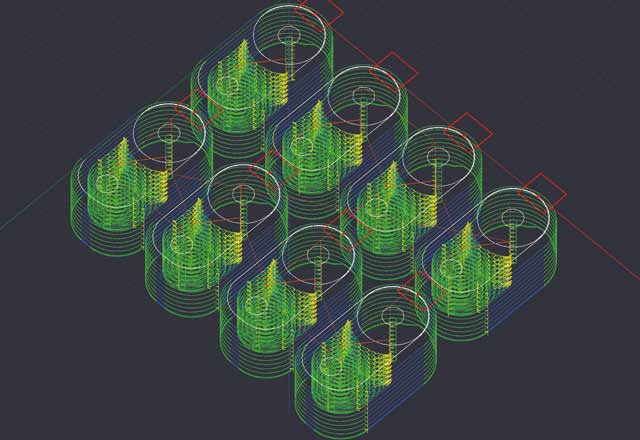
Problème réglé et vingt balles d'économisé !
Petite pièce qui va servir de support pour l'axe de transfert des tringleries.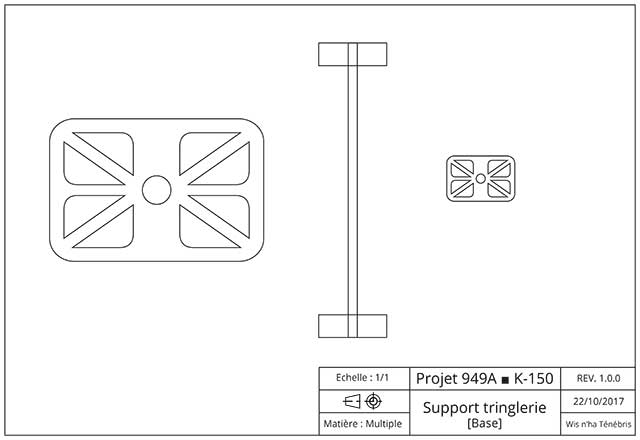
La pièce est prête à être usinée !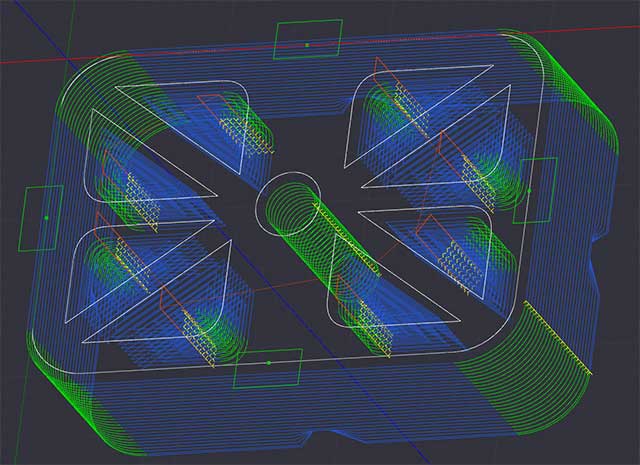
Malgré, un petit soucis avec la CNC, je suis arrivé à sortir cette après-midi les bras de commande...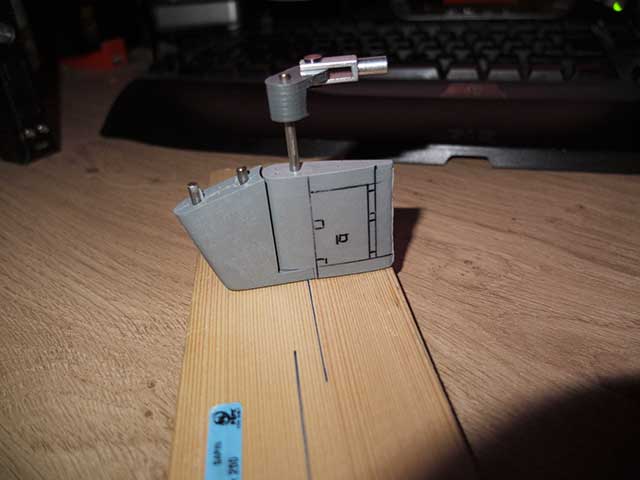
J'ai fais une petite erreur sur mon G-code, rien de bien folichon mais bon ça rend la pièce usinée moins belle mais en l'état elle répond à mon besoin, il reste un trou et un taraudage à faire sur la pièce...
Sur le safran et le plan de dérive, il me reste des détails à ajouter ! 
Un peu d'images intéressantes...
Etrave, on vois bien les dalots sous l'étrave...
Les hélices du Tomsk...
Paserelle de veille...
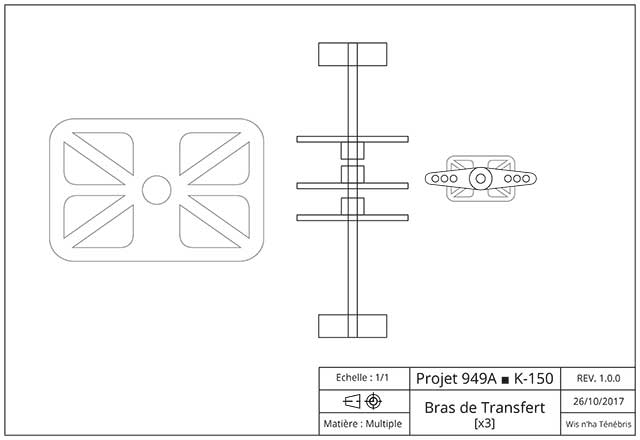
Retour sur les pièces, le bras de commande corrigé et les supports de l'axe de transfert des commandes...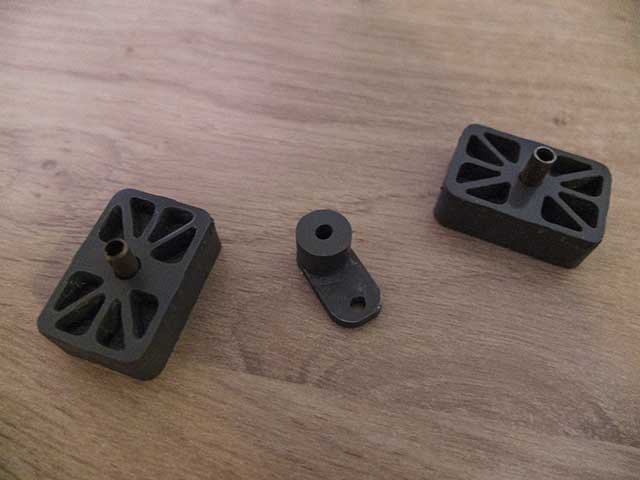
Il reste à faire les bras de transfert !